
This research develops a distributed multi-robot task allocation framework that enables autonomous robots to estimate tasks, share information, coordinate assignments, and avoid collisions without relying on a central server. The approach improves efficiency, scalability, and resilience, with applications in emergency response, particularly supporting firefighters during life-saving operations.
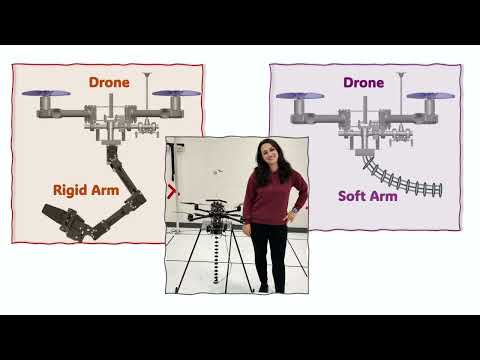
This research develops drones with soft robotic arms capable of safely grasping and transporting objects in challenging environments. By combining predictive modelling with visual feedback, it overcomes control challenges associated with soft materials. The work advances intelligent, adaptive aerial robotics for applications such as emergency delivery and hazardous environments.