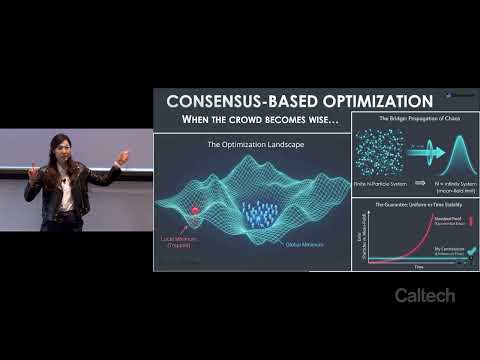
This research develops rigorous mathematical foundations for consensus-based optimization algorithms, where large groups of interacting particles collaboratively search for optimal solutions. Using mean-field theory and propagation of chaos, the work proves long-term stability and improves optimization methods for applications including robotics, aircraft design, and drug discovery under real-world constraints.
This research improves drone-based search and rescue by creating networks of communicating drones that optimize data routing. Inspired by traffic flow, it minimizes delays by avoiding congested paths. Faster data transmission enables quicker detection and response, allowing larger areas to be searched efficiently and increasing the chances of saving lives.